Next part.
As you know, we have some newer code, posted here
https://github.com/realizator/stereopi-fisheye-robot
Please notice, that for this experimrnt I've used new
Buster OpenCV image. You can find this link in GitHub repo too.
I can suggest, that having V2 cameras you think, that this "fisheye" code is not your case. Actually this code works for the "classic FOV" cameras too, AND support fisheye cameras.
As I mentioned in related
article, this code has some important updates, like "all code inside" instead of using external calibration libraries. Also we used some tricks to increase calibration quality.
So I decided to suggest your images as an input for this code.
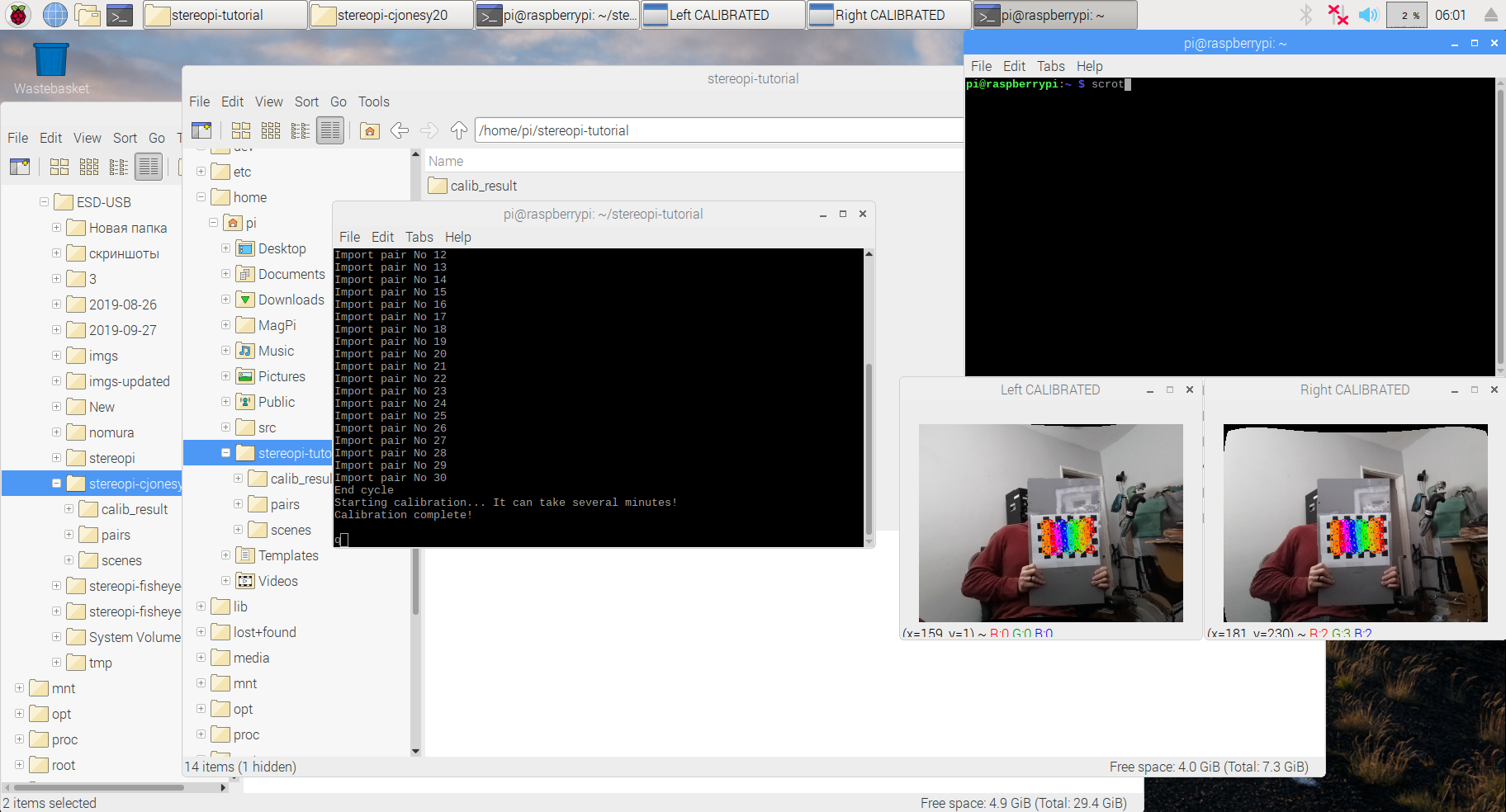
One notice. For improving chessboard detection quality we use a trick. For finding chessboard corners we use images with twice bigger resolution, and after that we decrease both X and Y coordinates of every corner twice, and use that data. So 4th script in this repo actually uses images with bigger resolution (taken in script 2_chess_cycle.py).
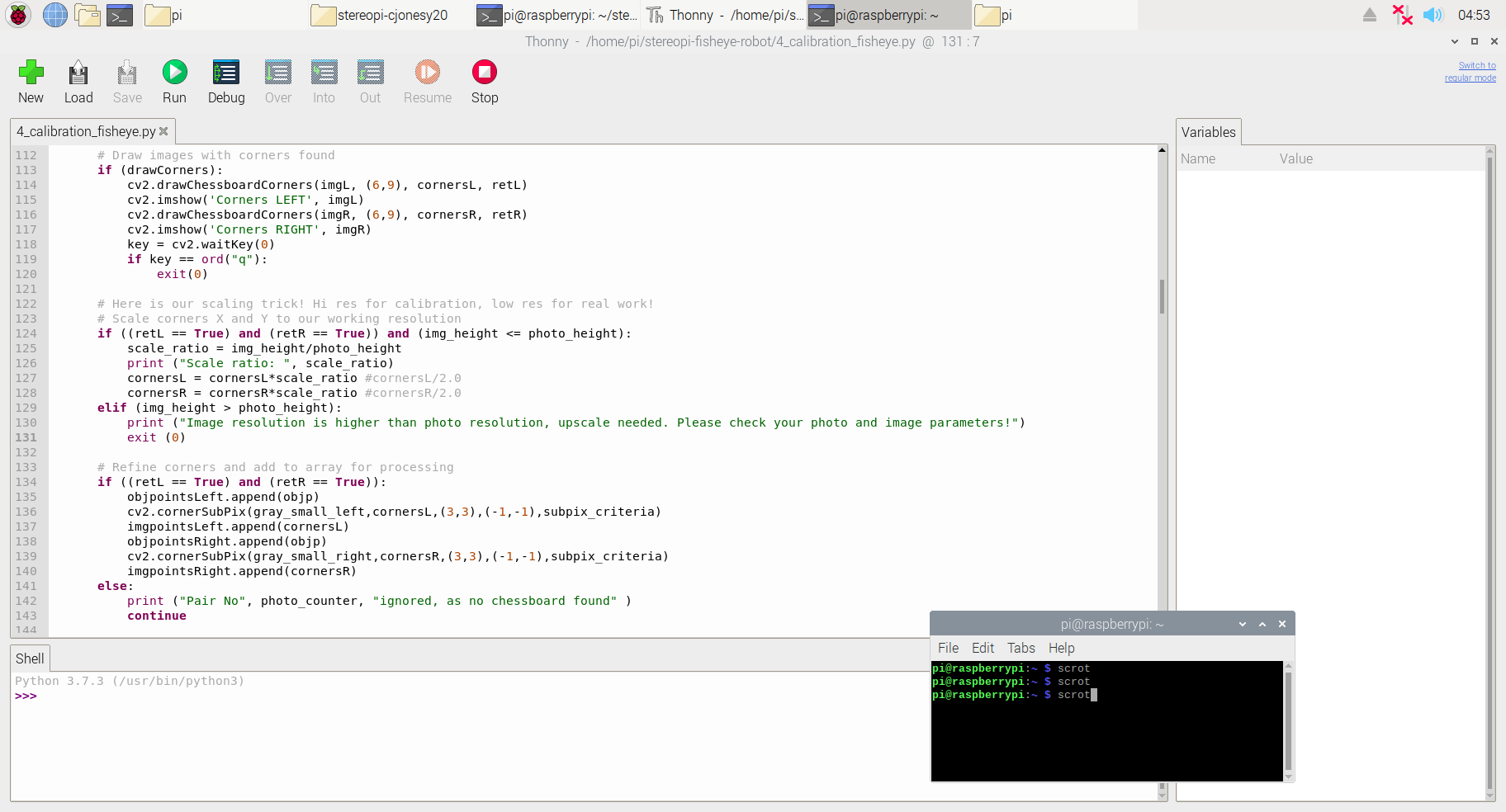
But your set has lower resolution, so to make your images set "compatible" I've commented this tricky code. I mean rows from 124 and up to 131.
Here is a screenshot before commenting:
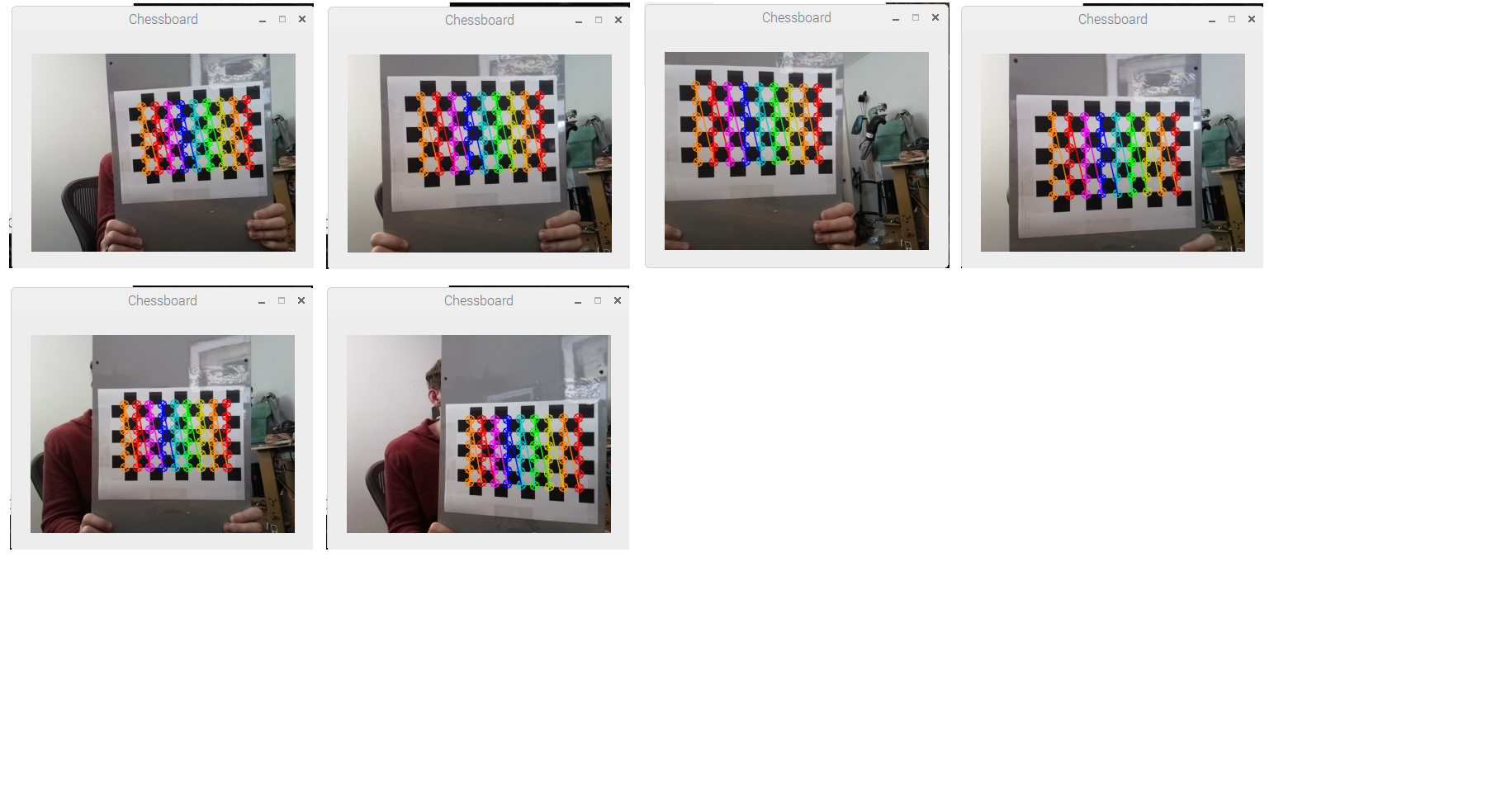
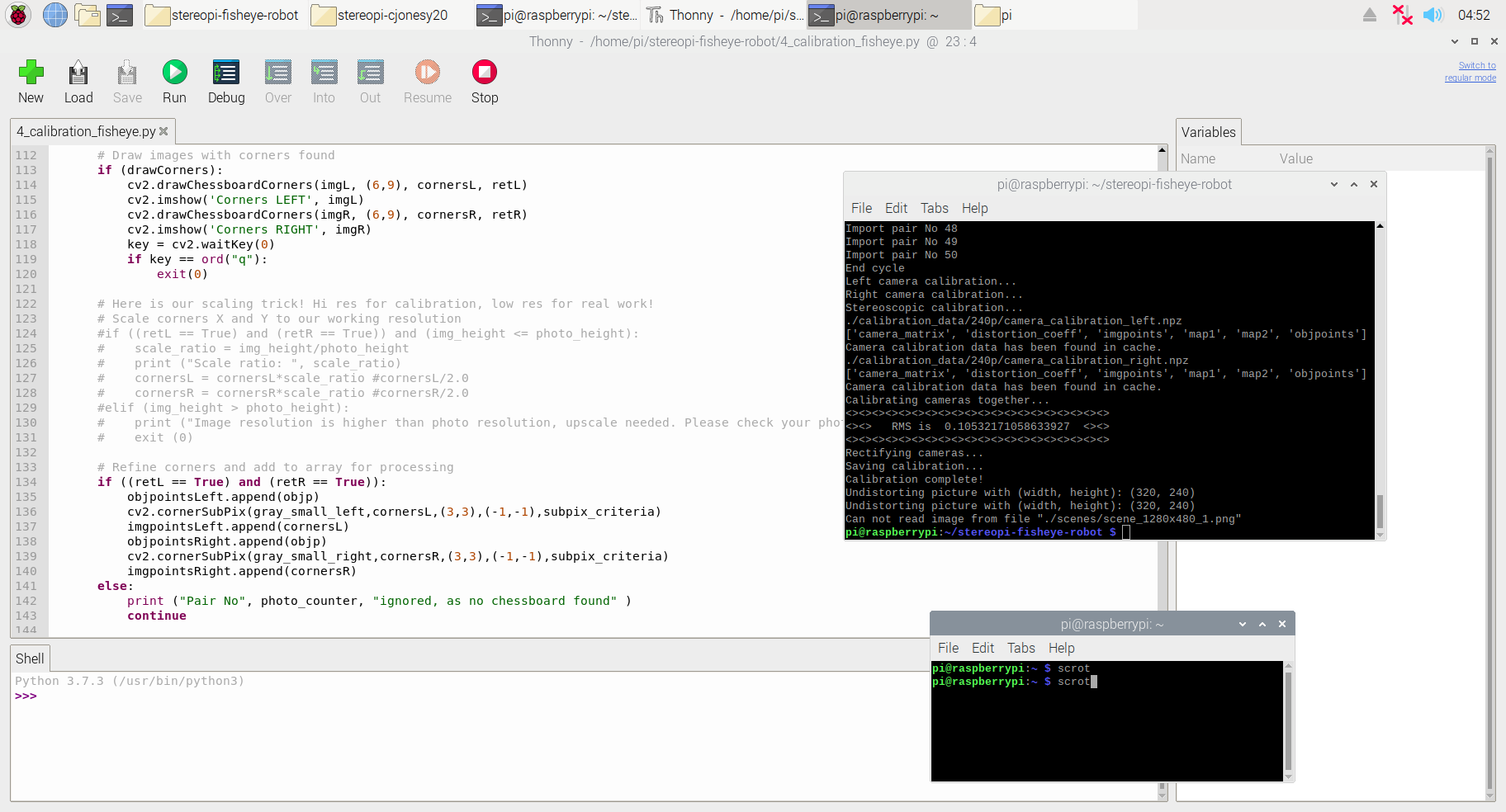
And screenshot after:
Also original version of this script use file name "scene_1280x480_1.png" in a row 58 to show you final result. I changed it to "scene_640x240_1.png"
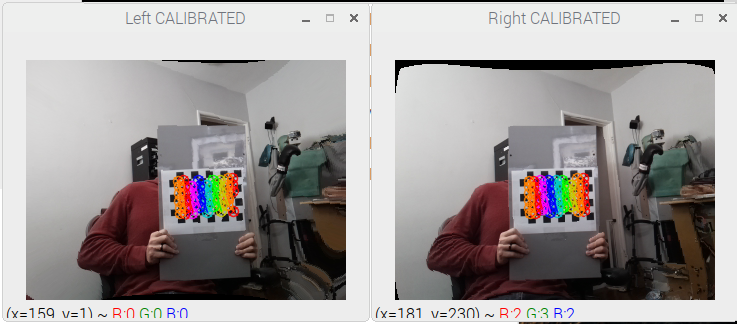
And here is the result of fisheye-enabled calibration:
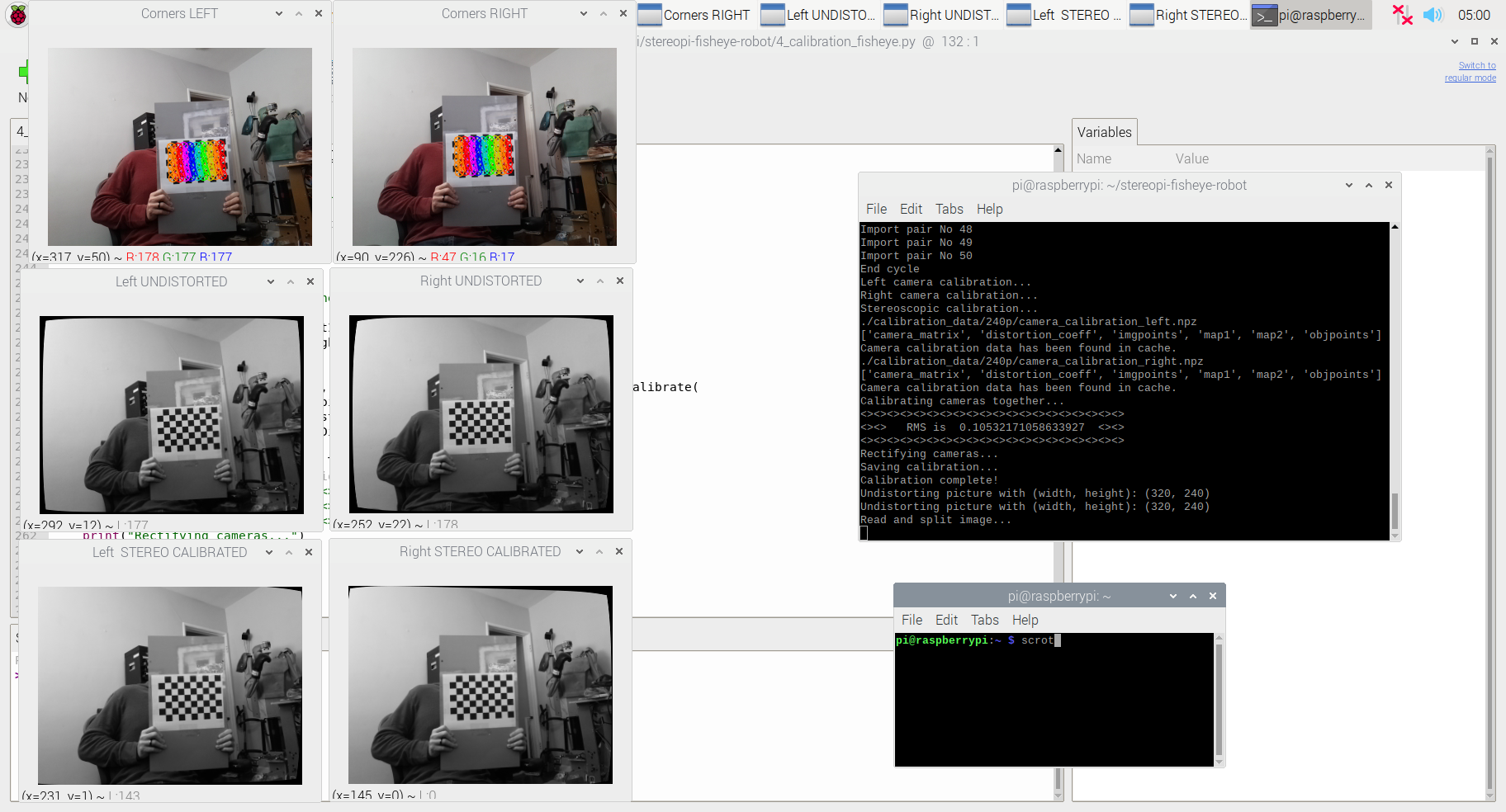
Full resolution image:
http://stereopi.com/sites/default/files ... _scrot.png
First line with the 2 images shows last two chessboard detections.
Second line with 2 images (Left_UNDISTORTED and Right_UNDISTORTED) shows you images after removing fisheye
distortion. It's fun, but actually even V2 cameras has a small fisheye
distortion 
And the last line with 2 images (Left STEREO CALIBRATED and Right STEREO CALIBRATED) shows you two images, rectified as a stereopair.
Brief conclusion: you may use our newest fisheye code to work with your non-fisheye cameras!